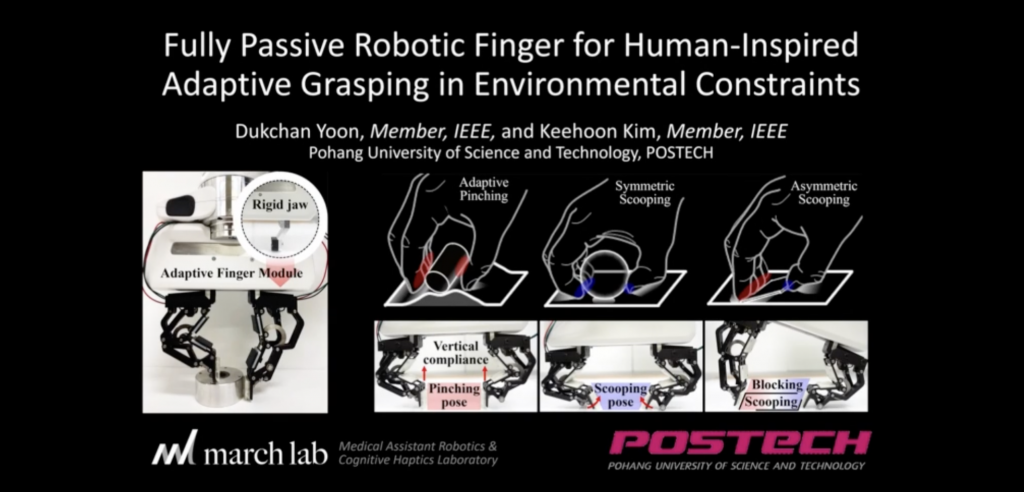
Dukchan Yoon, Keehon Kim, “Fully Passive Robotic Finger for Human-Inspired Adaptive Grasping in Environmental Constraints,” IEEE/ASME Transactions on Mechatronics, 2022.
MENU
Dukchan Yoon, Keehon Kim, “Fully Passive Robotic Finger for Human-Inspired Adaptive Grasping in Environmental Constraints,” IEEE/ASME Transactions on Mechatronics, 2022.