Joonsub Byun, Joonseon Hwang, Yong-An Chung, Hyeonseok Jeong, Jooyeon Ki, and Keehoon Kim, “Exploring immersion through a fMRI-compatible multi-finger handheld haptic display,” in PlosOne, doi: https://doi.org/10.1371/journal.pone.0343297.
MENU
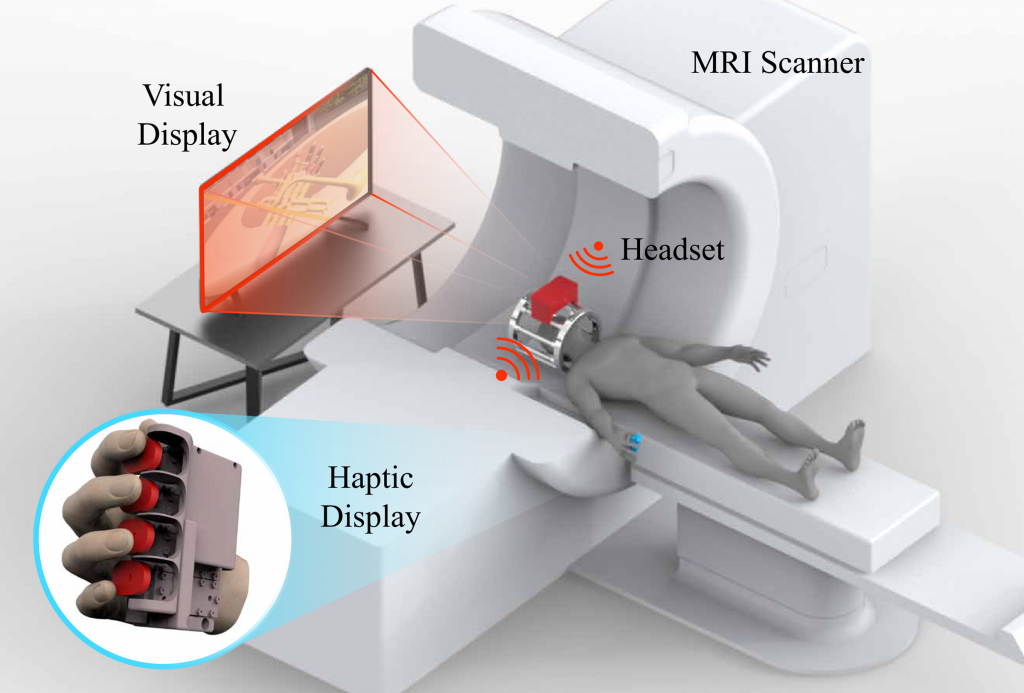
Joonsub Byun, Joonseon Hwang, Yong-An Chung, Hyeonseok Jeong, Jooyeon Ki, and Keehoon Kim, “Exploring immersion through a fMRI-compatible multi-finger handheld haptic display,” in PlosOne, doi: https://doi.org/10.1371/journal.pone.0343297.
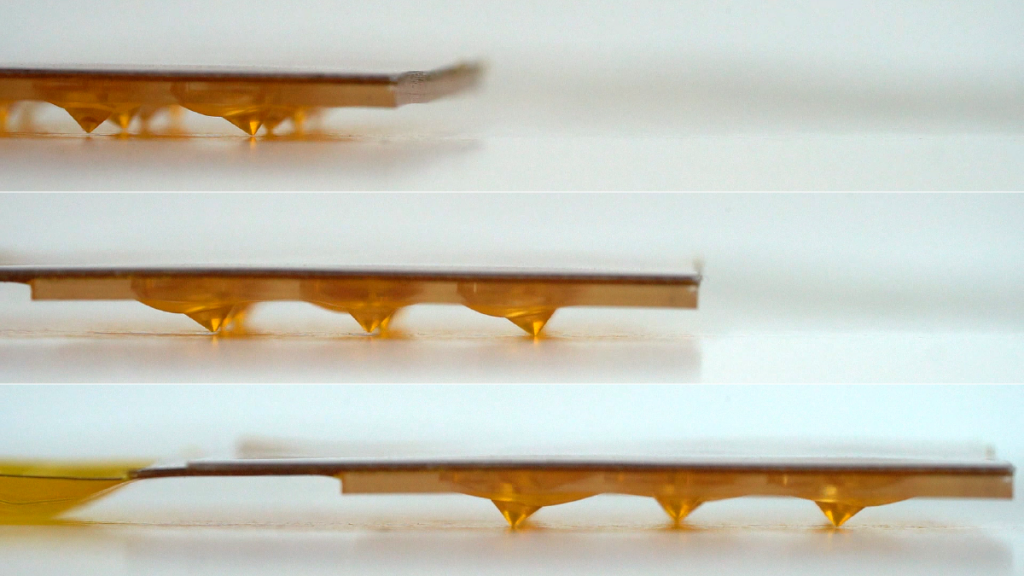
Hyunggon Shin, Wankyun Chung, and Keehoon Kim, “Soft and flexible robot skin actuator using multilayer 3D pneumatic network,” in Nature Communications, doi: https://doi.org/10.1038/s41467-025-60496-9.

Jaehyun Park, Yeoeun Kim, Il Seop Choi, Sang-Woo Choi, Seungmoon Choi, and Keehoon Kim, “Assessment of Novel Haptic Interfaces for Digital Twin Teleoperation in High-Risk Steel Production,” in Transactions on Industrial Informatics, doi: 10.1109/TII.2025.3556077.

Jaewon Byun, Joonsub Byun, Junsu Kang, Inje Yi, Jungwoo Lee, Kyoungseok Noh, Jongchan Kim, Youngho Choi, Goobong Chung, Sangrok Oh, and Keehoon Kim, “Autonomous Ultraviolet-C Disinfection and Wiping Robot: Assessment in a Hospital Environment,” in IEEE Robotics & Automation Magazine, doi: 10.1109/MRA.2025.3543958.

Y. Lee and K. Kim, “Accurate Robotic Pushing Manipulation through Online Model Estimation under Uncertain Object Properties,” in IEEE Robotics and Automation Letters, doi: 10.1109/LRA.2024.3449695.
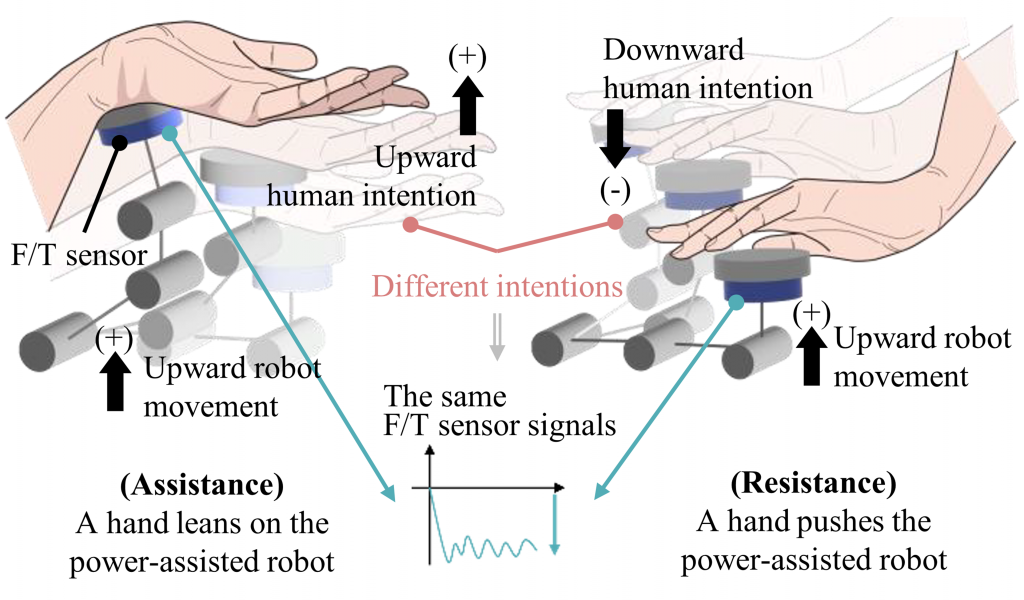
Jaewon Byun, and Keehoon Kim. “Benefits of Employing Surface Electromyography Signals for Power-Assisted Control from an Agility Perspective.” IEEE Access (2024).

Man Bok Hong, Dukchan Yoon, Jaehyun Park, and Keehoon Kim. “KULEX-Wrist: Design and Analysis of Linkage-Driven Exoskeleton for Wrist Assistance”, ASME Journal of Mechanical Design (2024)
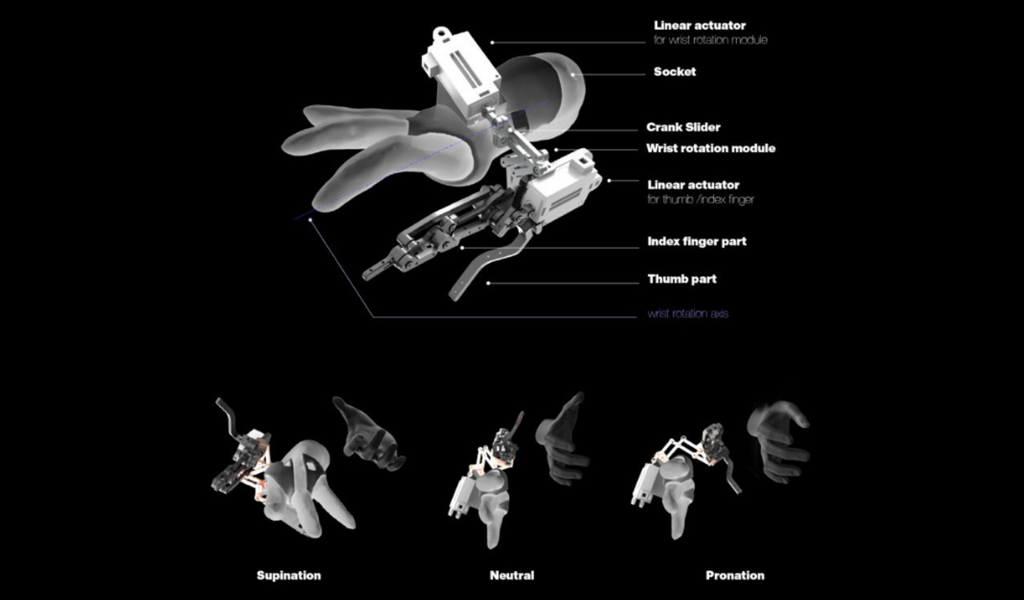
Seoyoung Choi, Wonwoo Cho, and Keehoon Kim. “Restoring Natural Upper Limb Movement through a Wrist Prosthetic Module for Partial Hand Amputees.”, Journal of NeuroEngineering and Rehabilitation (2023)
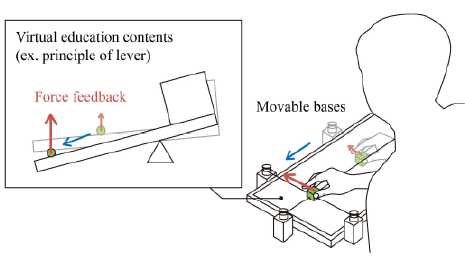
Jinhyuk Yoon, Donghyeon Lee, Junyong Bang, Hyung Gon Shin, Wan Kyun Chung, Seungmoon Choi, and Keehoon Kim, “Cable-Driven Haptic Interface with Movable Bases Achieving Maximum Workspace and Isotropic Force Exertion”, IEEE Transactions on Haptics
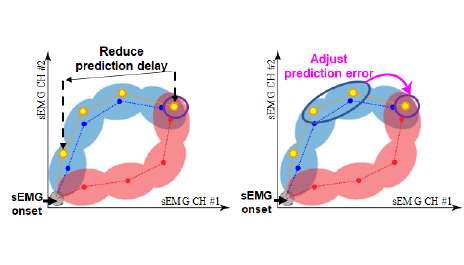
Chaerin Hong, Seongsik Park, Keehoon Kim, “sEMG-based Gesture Recognition Using Temporal History”, IEEE Transactions on Biomedical Engineering, Early Access.

Donghyeon Lee, Dongwoo Ko, Wan Kyun Chung, Keehoon Kim, “Quadratic Programming-based Task Scaling for Safe and Passive Robot Arm Teleoperation,” IEEE/ASME Transactions on Mechatronics, 2022.100368.
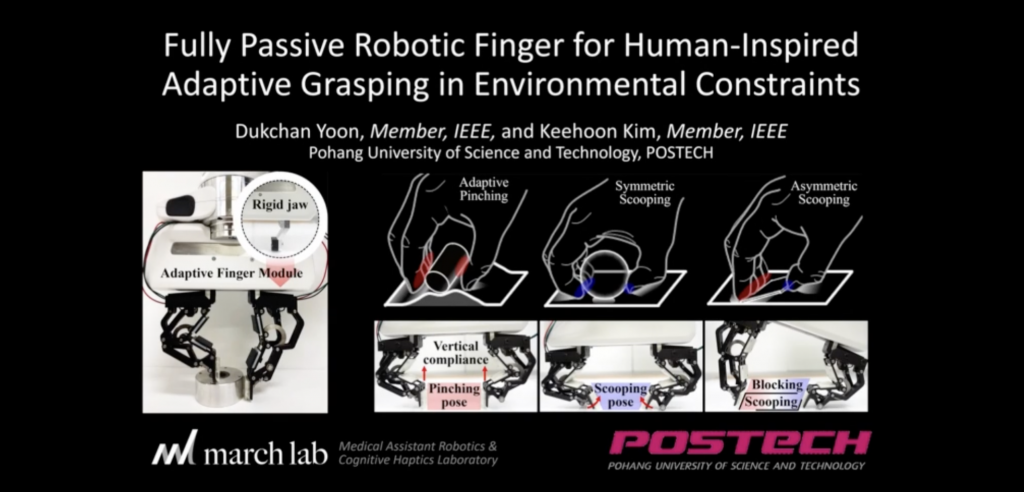
Dukchan Yoon, Keehon Kim, “Fully Passive Robotic Finger for Human-Inspired Adaptive Grasping in Environmental Constraints,” IEEE/ASME Transactions on Mechatronics, 2022.