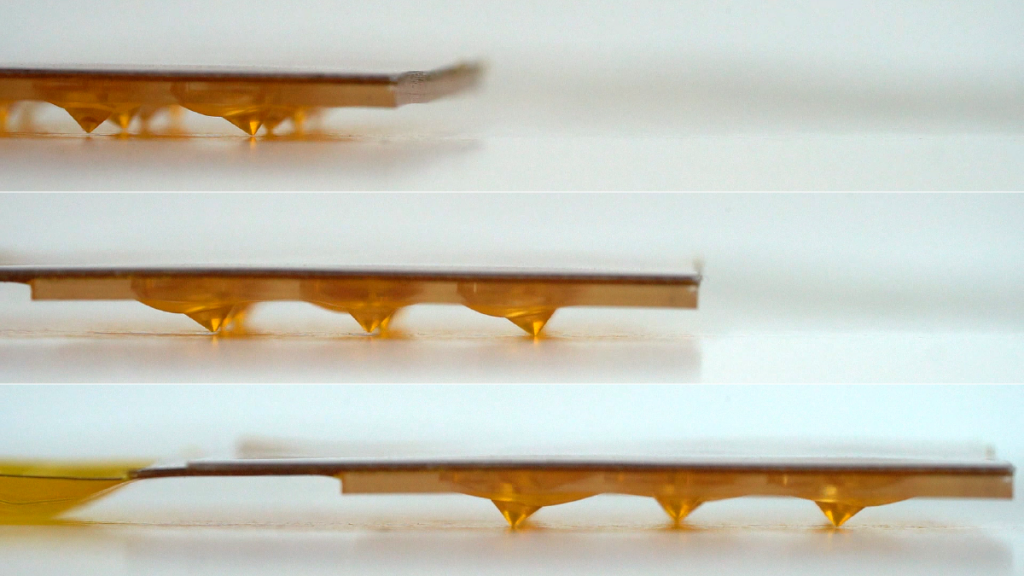
Hyunggon Shin, Wankyun Chung, and Keehoon Kim, “Soft and flexible robot skin actuator using multilayer 3D pneumatic network,” in Nature Communications,
MENU
Hyunggon Shin, Wankyun Chung, and Keehoon Kim, “Soft and flexible robot skin actuator using multilayer 3D pneumatic network,” in Nature Communications,

At the prestigious IEEE International Conference on Robotics and Automation (ICRA), students Juwan Han and Seunghyun Park were honored with the Best Paper Award in the field of medical robotics. Their paper, titled “In-vivo Tendon-Driven Rodent Ankle Exoskeleton System for Sensorimotor Rehabilitation,” was recognized for its innovation and impact in advancing sensorimotor rehabilitation technologies.

We are pleased to announce that three research papers have been accepted for presentation at ICRA 2025. Congratulations to Jaehyun Park, Yongseok Lee, Juwan Han, and Seunghyun Park on this achievement. Details of the accepted papers will be available on our YouTube channel and publication page.

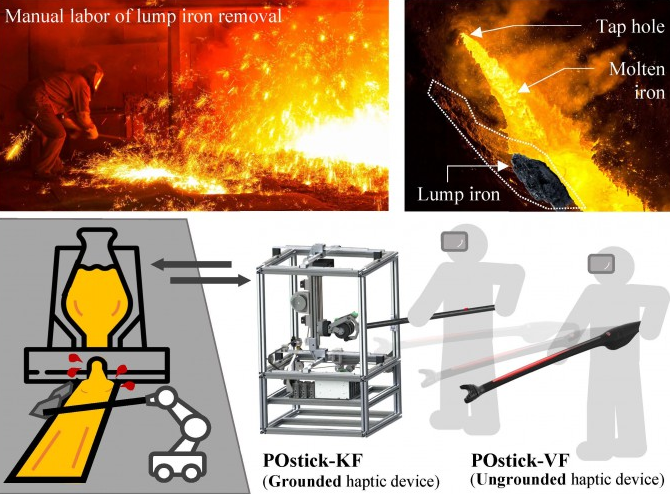
Jaehyun Park, Yeoeun Kim, Il Seop Choi, Sang-Woo Choi, Seungmoon Choi, and Keehoon Kim, “Assessment of Novel Haptic Interfaces for Digital Twin Teleoperation in High-Risk Steel Production,” in Transactions on Industrial Informatics, doi: 10.1109/TII.2025.3556077.

Jaewon Byun, Joonsub Byun, Junsu Kang, Inje Yi, Jungwoo Lee, Kyoungseok Noh, Jongchan Kim, Youngho Choi, Goobong Chung, Sangrok Oh, and Keehoon Kim, “Autonomous Ultraviolet-C Disinfection and Wiping Robot: Assessment in a Hospital Environment,” in IEEE Robotics & Automation Magazine, doi: 10.1109/MRA.2025.3543958.

Yeoeun Kim won the 2nd prize in the RED Show category at the 20th Korea Robotics Society Conference.

Yongseok Lee won the Silver Prize in the Mechanical Engineering category at the 31st Samsung Human-Tech Paper Award.

Congratulations to Han Juwan on completing his master’s degree! Wishing you continued success and good fortune in your Ph.D. journey at MARCH Lab!

On February 10, 2025, we had the honor of welcoming LG Electronics to our lab. During the visit, we showcased our latest research through live demonstrations. The visit also served as a great opportunity for meaningful discussions and mutual exchange.

On January 22, 2025, we had the honor of welcoming POSTECH Holdings to our lab. The visit featured an overview of our core research areas, followed by live demonstrations showcasing ongoing projects.

On November 14, 2024, Professor Keehoon Kim was honored with the prestigious Minister’s Award at the Future Convergence Forum. This recognition highlights his outstanding contributions to the advancement of convergence technology. The award, presented as a certificate of commendation, acknowledges Professor Kim’s significant achievements in driving innovation and development in the field.

POSTECH alumnus (’91) Kwan-Sik Yoon (now CEO of Changin Partners) has generously donated funds to support research in the field of bionics and medical rehabilitation robotics, including robotic hand prostheses within the Department of Mechanical Engineering. He also visited our lab to share insights and encouragement.
MARCH alumnus Gucheol Jeong won the Best Paper Award at IROS 2024 and presented his work in a seminar on October 28. Jeong, Gu-Cheol, et al. “BaRiFlex: A Robotic Gripper with Versatility and Collision Robustness for Robot Learning.” 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2024.

On October 23, Hyundai Motor and Kia announced the establishment of a “Robotics Research Lab” in collaboration with Seoul National University, POSTECH, and KIST.

Y. Lee and K. Kim, “Accurate Robotic Pushing Manipulation through Online Model Estimation under Uncertain Object Properties,” in IEEE Robotics and Automation Letters, doi: 10.1109/LRA.2024.3449695.
On May 22, our laboratory was honored to welcome representatives from the U.S. Department of Defense and the Korea Planning&Evaluation Institute of Industrial Technology (KEIT).
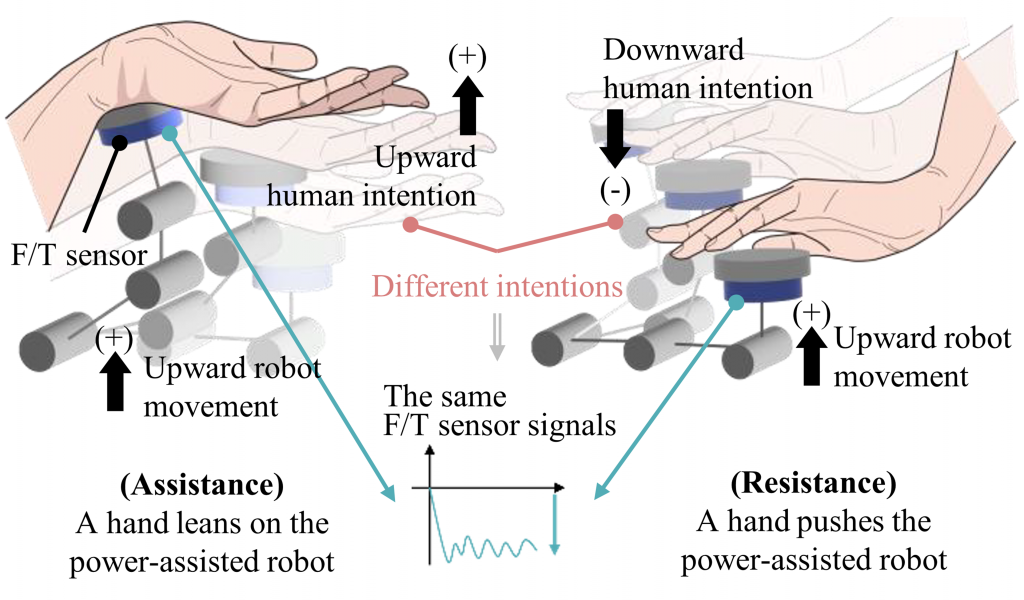
Jaewon Byun, and Keehoon Kim. “Benefits of Employing Surface Electromyography Signals for Power-Assisted Control from an Agility Perspective.” IEEE Access (2024).

Man Bok Hong, Dukchan Yoon, Jaehyun Park, and Keehoon Kim. “KULEX-Wrist: Design and Analysis of Linkage-Driven Exoskeleton for Wrist Assistance”, ASME Journal of Mechanical Design (2024)
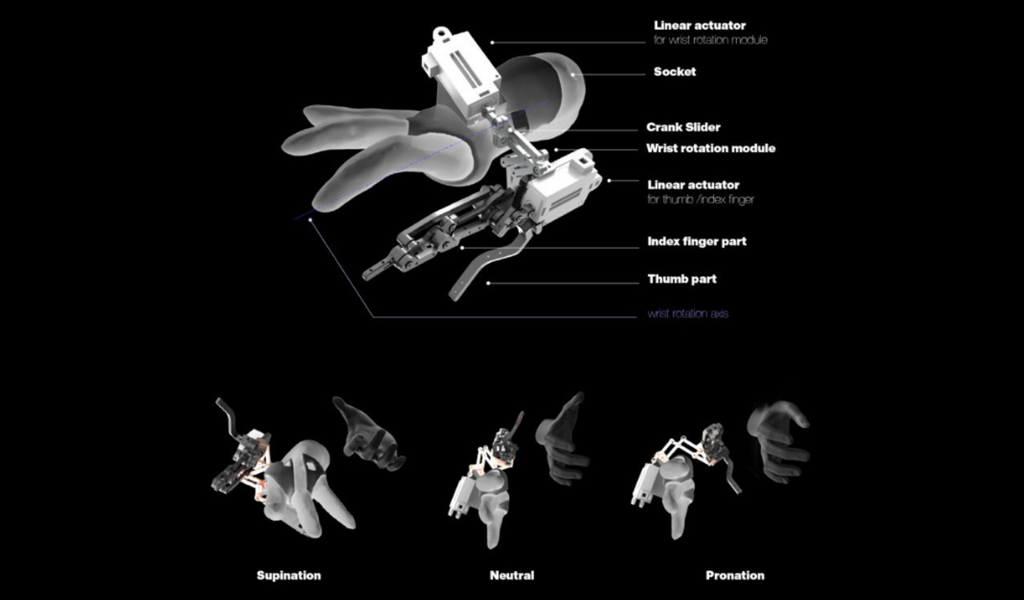
Seoyoung Choi, Wonwoo Cho, and Keehoon Kim. “Restoring Natural Upper Limb Movement through a Wrist Prosthetic Module for Partial Hand Amputees.”, Journal of NeuroEngineering and Rehabilitation (2023)
성소연, 이용석, 변준섭 학생의 졸업을 축하합니다!

이인제 학생의 졸업을 축하합니다!
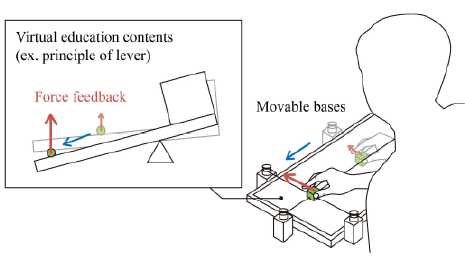
Jinhyuk Yoon, Donghyeon Lee, Junyong Bang, Hyung Gon Shin, Wan Kyun Chung, Seungmoon Choi, and Keehoon Kim, “Cable-Driven Haptic Interface with Movable Bases Achieving Maximum Workspace and Isotropic Force Exertion”, IEEE Transactions on Haptics
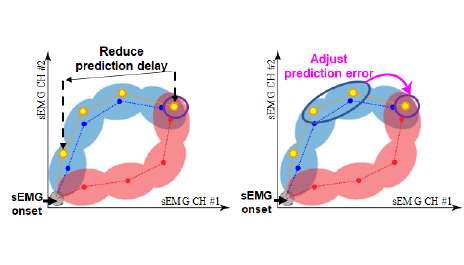
Chaerin Hong, Seongsik Park, Keehoon Kim, “sEMG-based Gesture Recognition Using Temporal History”, IEEE Transactions on Biomedical Engineering, Early Access.
홍채린 학생, 박재현 학생, 방준용 학생, 홍승택 학생이 석사과정 디펜스를 마쳤습니다!

Donghyeon Lee, Dongwoo Ko, Wan Kyun Chung, Keehoon Kim, “Quadratic Programming-based Task Scaling for Safe and Passive Robot Arm Teleoperation,” IEEE/ASME Transactions on Mechatronics, 2022.100368.

변재원 학생이 석사과정 디펜스를 마쳤습니다!
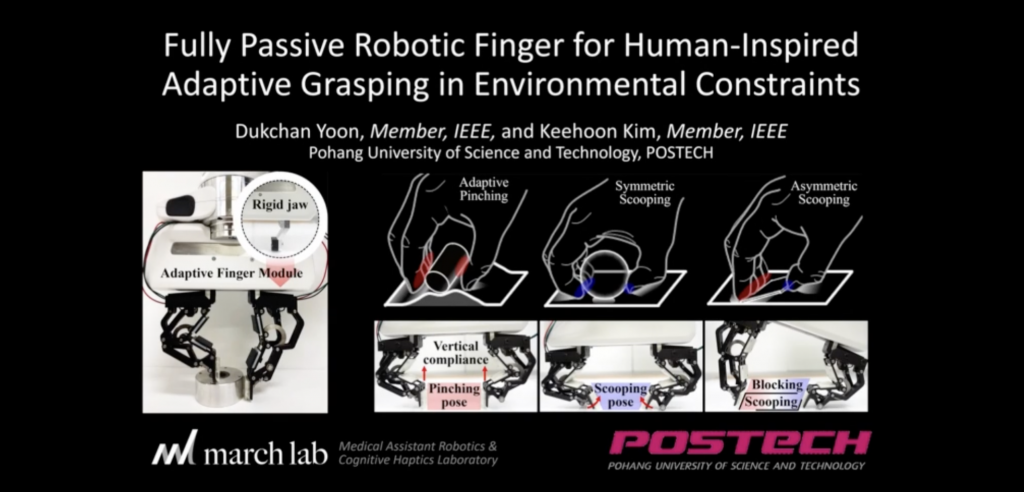
Dukchan Yoon, Keehon Kim, “Fully Passive Robotic Finger for Human-Inspired Adaptive Grasping in Environmental Constraints,” IEEE/ASME Transactions on Mechatronics, 2022.